Obtener la matriz de masa para los manipuladores en Simulink
En este ejemplo se muestra cómo calcular la matriz de masa de un manipulador robótico con un modelo rigidBodyTree. En este ejemplo, se define un modelo de robot y sus configuraciones en MATLAB® y se pasan a Simulink® para utilizarlos con los bloques del algoritmo del manipulador.
Cargue un objeto rigidBodyTree que modele un robot KUKA LBR iiwa 7. Utilice la función homeConfiguration para obtener la configuración inicial o las posiciones de las articulaciones de origen del robot. Utilice la función randomConfiguration para generar una configuración aleatoria dentro de los límites de las articulaciones del robot.
lbr = loadrobot("kukaIiwa7",DataFormat="column"); homeConfig = homeConfiguration(lbr); randomConfig = randomConfiguration(lbr);
Abra el modelo. Si es necesario, utilice el botón de callback Load Robot Model (Cargar modelo de robot) para volver a cargar el modelo del robot y los vectores de configuración.
El bloque Joint Space Mass Matrix (Matriz de masa del espacio articular) calcula la matriz de masa de la configuración indicada.
open_system("mass_matrix_example.slx")
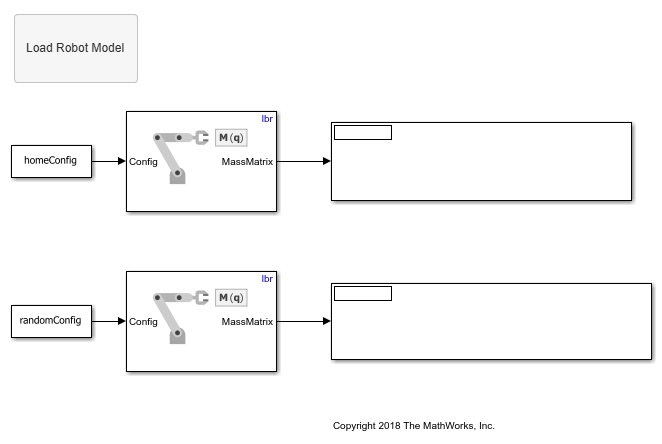
Ejecute el modelo para mostrar las matrices de masa de cada configuración.