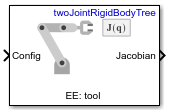
Get Jacobian
Jacobianas geométricas para configurar robots
Bibliotecas:
Robotics System Toolbox /
Manipulator Algorithms
Descripción
El bloque Get Jacobian genera la jacobiana geométrica en relación con la base para el efector final especificado en la configuración dada de un modelo de robot rigidBodyTree.
La jacobiana relaciona la velocidad del espacio articular con la velocidad del efector final respecto al marco de coordenadas de la base. La velocidad del efector final es igual a:
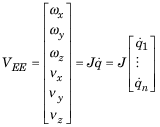
ω es la velocidad angular, υ es la velocidad lineal, y  es la velocidad del espacio articular.
es la velocidad del espacio articular.
Ejemplos

Calcular una jacobiana geométrica para los manipuladores en Simulink
Calcule la jacobiana geométrica para manipuladores robóticos usando un modelo de robot de árbol de cuerpo rígido que se pasa a bloques del algoritmo del manipulador de Simulink®.
Puertos
Entrada
Salida
La jacobiana geométrica del efector final con la configuración especificada, Config, generada como una matriz de 6 por n, donde n es el número de grados de libertad del efector final. La jacobiana relaciona la velocidad del espacio articular con la velocidad del efector final respecto al marco de coordenadas de la base. La velocidad del efector final es igual a:
ω es la velocidad angular, υ es la velocidad lineal, y es la velocidad del espacio articular.
Parámetros
Capacidades ampliadas
Historial de versiones
Introducido en R2018a
Consulte también
Bloques
- Get Transform | Forward Dynamics | Inverse Dynamics | Gravity Torque | Joint Space Mass Matrix | Velocity Product Torque