tune
Ajuste los parámetros insEKF para reducir el error de estimación
Desde R2022a
Sintaxis
Descripción
tunedMeasureNoise = tune(filter,measureNoise,sensorData,groundTruth)AdditiveProcessNoise del objeto de filtro insEKF filter y el ruido de medición, para reducir el error de estimación de estado de raíz cuadrada media (RMS) entre los datos del sensor fusionado y la ground-truth. La función también devuelve el ruido de medición sintonizado tunedMeasureNoise. La función utiliza los valores de propiedad en el filtro y el ruido de medición proporcionado en la estructura measureNoise como estimación inicial para el algoritmo de optimización.
tunedMeasureNoise = tune(___,config)tunerconfig config, además de todos los argumentos de entrada de la sintaxis anterior.
Ejemplos
Cargue los datos registrados del sensor y los datos ground-truth.
load("accelGyroINSEKFData.mat");Crea un objeto de filtro insEKF. Especifique la parte de orientación del estado en el filtro utilizando la orientación inicial de los datos de medición. Especifique los elementos diagonales de la matriz de covarianza de error de estimación de estado correspondiente al estado de orientación como 0.01.
filt = insEKF; stateparts(filt,"Orientation",compact(initOrient)); statecovparts(filt,"Orientation",1e-2);
Obtenga una estructura de ruido de medición representativa y utilícela para estimar los estados antes de realizar la sintonización.
mnoise = tunernoise(filt); untunedEst = estimateStates(filt,sensorData,mnoise);
Reinicialice el filtro, configure un objeto tunerconfig y ajuste el filtro.
stateparts(filt,"Orientation",compact(initOrient)); statecovparts(filt,"Orientation",1e-2); cfg = tunerconfig(filt,MaxIterations=10,ObjectiveLimit=1e-4); tunedmn = tune(filt,mnoise,sensorData,groundTruth,cfg);
Iteration Parameter Metric
_________ _________ ______
1 AdditiveProcessNoise(1) 0.3787
1 AdditiveProcessNoise(15) 0.3761
1 AdditiveProcessNoise(29) 0.3695
1 AdditiveProcessNoise(43) 0.3655
1 AdditiveProcessNoise(57) 0.3533
1 AdditiveProcessNoise(71) 0.3446
1 AdditiveProcessNoise(85) 0.3431
1 AdditiveProcessNoise(99) 0.3428
1 AdditiveProcessNoise(113) 0.3427
1 AdditiveProcessNoise(127) 0.3426
1 AdditiveProcessNoise(141) 0.3298
1 AdditiveProcessNoise(155) 0.3206
1 AdditiveProcessNoise(169) 0.3200
1 AccelerometerNoise 0.3199
1 GyroscopeNoise 0.3198
2 AdditiveProcessNoise(1) 0.3126
2 AdditiveProcessNoise(15) 0.3098
2 AdditiveProcessNoise(29) 0.3018
2 AdditiveProcessNoise(43) 0.2988
2 AdditiveProcessNoise(57) 0.2851
2 AdditiveProcessNoise(71) 0.2784
2 AdditiveProcessNoise(85) 0.2760
2 AdditiveProcessNoise(99) 0.2744
2 AdditiveProcessNoise(113) 0.2744
2 AdditiveProcessNoise(127) 0.2743
2 AdditiveProcessNoise(141) 0.2602
2 AdditiveProcessNoise(155) 0.2537
2 AdditiveProcessNoise(169) 0.2527
2 AccelerometerNoise 0.2524
2 GyroscopeNoise 0.2524
3 AdditiveProcessNoise(1) 0.2476
3 AdditiveProcessNoise(15) 0.2432
3 AdditiveProcessNoise(29) 0.2397
3 AdditiveProcessNoise(43) 0.2381
3 AdditiveProcessNoise(57) 0.2255
3 AdditiveProcessNoise(71) 0.2226
3 AdditiveProcessNoise(85) 0.2221
3 AdditiveProcessNoise(99) 0.2202
3 AdditiveProcessNoise(113) 0.2201
3 AdditiveProcessNoise(127) 0.2201
3 AdditiveProcessNoise(141) 0.2090
3 AdditiveProcessNoise(155) 0.2070
3 AdditiveProcessNoise(169) 0.2058
3 AccelerometerNoise 0.2052
3 GyroscopeNoise 0.2052
4 AdditiveProcessNoise(1) 0.2051
4 AdditiveProcessNoise(15) 0.2027
4 AdditiveProcessNoise(29) 0.2019
4 AdditiveProcessNoise(43) 0.2000
4 AdditiveProcessNoise(57) 0.1909
4 AdditiveProcessNoise(71) 0.1897
4 AdditiveProcessNoise(85) 0.1882
4 AdditiveProcessNoise(99) 0.1871
4 AdditiveProcessNoise(113) 0.1870
4 AdditiveProcessNoise(127) 0.1870
4 AdditiveProcessNoise(141) 0.1791
4 AdditiveProcessNoise(155) 0.1783
4 AdditiveProcessNoise(169) 0.1751
4 AccelerometerNoise 0.1748
4 GyroscopeNoise 0.1747
5 AdditiveProcessNoise(1) 0.1742
5 AdditiveProcessNoise(15) 0.1732
5 AdditiveProcessNoise(29) 0.1712
5 AdditiveProcessNoise(43) 0.1712
5 AdditiveProcessNoise(57) 0.1626
5 AdditiveProcessNoise(71) 0.1615
5 AdditiveProcessNoise(85) 0.1598
5 AdditiveProcessNoise(99) 0.1590
5 AdditiveProcessNoise(113) 0.1589
5 AdditiveProcessNoise(127) 0.1589
5 AdditiveProcessNoise(141) 0.1517
5 AdditiveProcessNoise(155) 0.1508
5 AdditiveProcessNoise(169) 0.1476
5 AccelerometerNoise 0.1473
5 GyroscopeNoise 0.1470
6 AdditiveProcessNoise(1) 0.1470
6 AdditiveProcessNoise(15) 0.1470
6 AdditiveProcessNoise(29) 0.1463
6 AdditiveProcessNoise(43) 0.1462
6 AdditiveProcessNoise(57) 0.1367
6 AdditiveProcessNoise(71) 0.1360
6 AdditiveProcessNoise(85) 0.1360
6 AdditiveProcessNoise(99) 0.1350
6 AdditiveProcessNoise(113) 0.1350
6 AdditiveProcessNoise(127) 0.1350
6 AdditiveProcessNoise(141) 0.1289
6 AdditiveProcessNoise(155) 0.1288
6 AdditiveProcessNoise(169) 0.1262
6 AccelerometerNoise 0.1253
6 GyroscopeNoise 0.1246
7 AdditiveProcessNoise(1) 0.1246
7 AdditiveProcessNoise(15) 0.1244
7 AdditiveProcessNoise(29) 0.1205
7 AdditiveProcessNoise(43) 0.1203
7 AdditiveProcessNoise(57) 0.1125
7 AdditiveProcessNoise(71) 0.1122
7 AdditiveProcessNoise(85) 0.1117
7 AdditiveProcessNoise(99) 0.1106
7 AdditiveProcessNoise(113) 0.1104
7 AdditiveProcessNoise(127) 0.1104
7 AdditiveProcessNoise(141) 0.1058
7 AdditiveProcessNoise(155) 0.1052
7 AdditiveProcessNoise(169) 0.1035
7 AccelerometerNoise 0.1024
7 GyroscopeNoise 0.1014
8 AdditiveProcessNoise(1) 0.1014
8 AdditiveProcessNoise(15) 0.1012
8 AdditiveProcessNoise(29) 0.1012
8 AdditiveProcessNoise(43) 0.1005
8 AdditiveProcessNoise(57) 0.0948
8 AdditiveProcessNoise(71) 0.0948
8 AdditiveProcessNoise(85) 0.0938
8 AdditiveProcessNoise(99) 0.0934
8 AdditiveProcessNoise(113) 0.0931
8 AdditiveProcessNoise(127) 0.0931
8 AdditiveProcessNoise(141) 0.0896
8 AdditiveProcessNoise(155) 0.0889
8 AdditiveProcessNoise(169) 0.0867
8 AccelerometerNoise 0.0859
8 GyroscopeNoise 0.0851
9 AdditiveProcessNoise(1) 0.0851
9 AdditiveProcessNoise(15) 0.0850
9 AdditiveProcessNoise(29) 0.0824
9 AdditiveProcessNoise(43) 0.0819
9 AdditiveProcessNoise(57) 0.0771
9 AdditiveProcessNoise(71) 0.0771
9 AdditiveProcessNoise(85) 0.0762
9 AdditiveProcessNoise(99) 0.0759
9 AdditiveProcessNoise(113) 0.0754
9 AdditiveProcessNoise(127) 0.0754
9 AdditiveProcessNoise(141) 0.0734
9 AdditiveProcessNoise(155) 0.0724
9 AdditiveProcessNoise(169) 0.0702
9 AccelerometerNoise 0.0697
9 GyroscopeNoise 0.0689
10 AdditiveProcessNoise(1) 0.0689
10 AdditiveProcessNoise(15) 0.0686
10 AdditiveProcessNoise(29) 0.0658
10 AdditiveProcessNoise(43) 0.0655
10 AdditiveProcessNoise(57) 0.0622
10 AdditiveProcessNoise(71) 0.0620
10 AdditiveProcessNoise(85) 0.0616
10 AdditiveProcessNoise(99) 0.0615
10 AdditiveProcessNoise(113) 0.0607
10 AdditiveProcessNoise(127) 0.0606
10 AdditiveProcessNoise(141) 0.0590
10 AdditiveProcessNoise(155) 0.0578
10 AdditiveProcessNoise(169) 0.0565
10 AccelerometerNoise 0.0562
10 GyroscopeNoise 0.0557
Estime los estados nuevamente, esta vez usando el filtro ajustado.
tunedEst = estimateStates(filt,sensorData,tunedmn);
Compare las estimaciones ajustadas y no ajustadas con los datos ground-truth.
times = groundTruth.Properties.RowTimes; duntuned = rad2deg(dist(untunedEst.Orientation,groundTruth.Orientation)); dtuned = rad2deg(dist(tunedEst.Orientation,groundTruth.Orientation)); plot(times,duntuned,times,dtuned); xlabel("Time (sec)") ylabel("Error (deg)") legend("Untuned","Tuned") title("Filter Orientation Error")
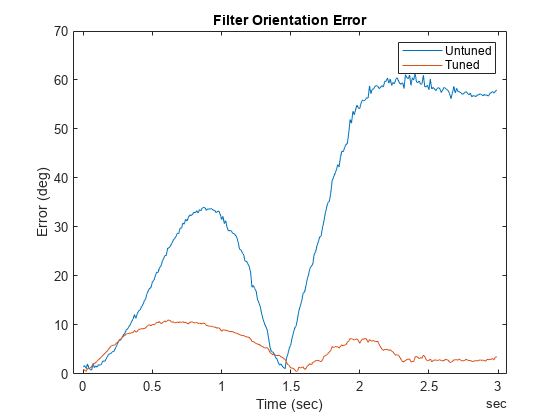
Imprima el error cuadrático medio (RMS) de los filtros ajustados y no ajustados.
untunedRMSError = sqrt(mean(duntuned.^2)); tunedRMSError = sqrt(mean(dtuned.^2)); fprintf("Untuned RMS error: %.2f degrees\n", ... untunedRMSError);
Untuned RMS error: 39.47 degrees
fprintf("Tuned RMS error: %.2f degrees\n", ... tunedRMSError);
Tuned RMS error: 6.39 degrees
Argumentos de entrada
Argumentos de salida
Referencias
[1] Abbeel, P., Coates, A., Montemerlo, M., Ng, A.Y. and Thrun, S. Discriminative Training of Kalman Filters. In Robotics: Science and systems, Vol. 2, pp. 1, 2005.
Historial de versiones
Introducido en R2022a
Consulte también
tunerconfig | tunernoise | predict | fuse | residual | correct | stateparts | statecovparts | stateinfo | estimateStates | createTunerCostTemplate | tunerCostFcnParam