Joint Space Mass Matrix
Matriz de masa del espacio articular para configurar robots

Bibliotecas:
Robotics System Toolbox /
Manipulator Algorithms
Descripción
El bloque Joint Space Mass Matrix genera la matriz de masa del espacio articular de una configuración de robot determinada (posiciones de las articulaciones) para el modelo de robot Rigid body tree.
Ejemplos
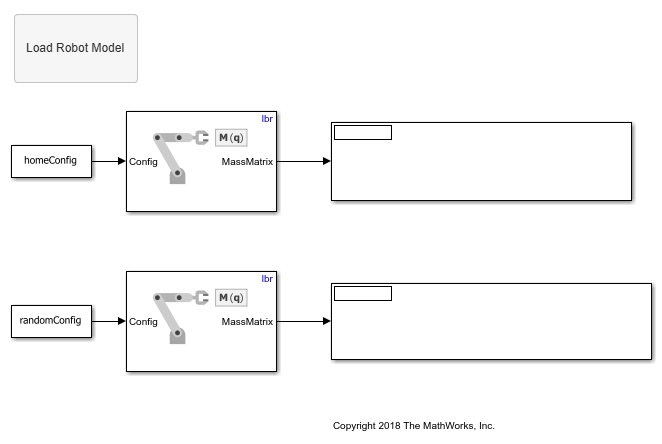
Obtener la matriz de masa para los manipuladores en Simulink
Calcule la matriz de masa para manipuladores robóticos con un modelo de robot de árbol de cuerpo rígido que se pasa a bloques del algoritmo del manipulador de Simulink®.
Puertos
Entrada
Salida
Parámetros
Capacidades ampliadas
Historial de versiones
Introducido en R2018a