Diseño de filtros IIR
Este ejemplo compara los diseños clásicos Butterworth, Chebyshev y elíptico, y explora los filtros Bessel, Yule-Walker y Butterworth generalizados.
Filtros IIR frente a filtros FIR
La principal ventaja de los filtros IIR frente a los filtros FIR es que suelen cumplir un conjunto determinado de especificaciones con un orden del filtro mucho menor que el de un filtro FIR equivalente. Aunque los filtros IIR tienen fase no lineal, el procesamiento de datos dentro del software MATLAB® suele realizarse "sin conexión", es decir, la secuencia completa de datos está disponible antes del filtrado. Esto permite un enfoque de filtrado no causal y de fase cero (por medio de la función filtfilt), que elimina la distorsión de fase no lineal de un filtro IIR.
Filtros IIR clásicos
Los filtros IIR clásicos, Butterworth, Chebyshev tipos I y II, elíptico y Bessel se aproximan al filtro ideal de "brick wall" (pared de ladrillos) de diferentes maneras.
Signal Processing Toolbox™ proporciona funciones para crear todos estos tipos de filtros IIR clásicos tanto en el dominio analógico como en el digital (excepto el de Bessel, para el que solo se admite el caso analógico), así como en configuraciones paso bajo, paso alto, paso banda y eliminador de banda. Para la mayoría de los tipos de filtro, también se puede encontrar el orden de filtro más bajo que se ajusta a una especificación de filtro dada en lo que respecta a la atenuación de la banda de paso y de la banda de parada, y a los anchos de transición.
Otros filtros IIR
La función de diseño de filtros directos yulewalk encuentra un filtro con una respuesta de magnitud que se acerca a una función de respuesta de frecuencia especificada. Se trata de una forma de crear un filtro paso banda multibanda.
También puede utilizar las funciones de modelado paramétrico o de identificación del sistema para diseñar filtros IIR. Estas funciones se analizan en Parametric Modeling.
La función de diseño Butterworth generalizado maxflat se analiza en la sección Diseño de filtros Butterworth generalizados.
Resumen del método de filtrado IIR
En la siguiente tabla se resumen los distintos métodos de filtrado utilizando Signal Processing Toolbox™ y se enumeran las funciones disponibles para implementar dichos métodos.
Métodos y funciones disponibles de los filtros de la toolbox
Método de filtrado | Descripción | Funciones de filtro |
|---|---|---|
Prototipado analógico | A partir de los polos y ceros de un filtro paso bajo clásico de prototipado en el dominio continuo (Laplace), obtener un filtro digital mediante la transformación de la frecuencia y la discretización del filtro. | Diseño de filtros:
Estimación del orden: Prototipado analógico paso bajo: |
Diseño directo | Diseñar un filtro digital directamente en el dominio de tiempo discreto mediante la aproximación de una respuesta de magnitud lineal a trozos. | |
Diseño Butterworth generalizado | Diseñar filtros Butterworth paso bajo con más ceros que polos. | |
Modelado paramétrico | Encontrar un filtro digital que se aproxime a una respuesta prescrita en el dominio de tiempo o frecuencia. (Consulte la documentación de System Identification Toolbox™ para ver una colección exhaustiva de herramientas de modelización paramétrica). | Modelización en el dominio de tiempo: Modelización en el dominio de frecuencia: |
Diseño de filtros IIR clásicos mediante prototipado analógico
La principal técnica de diseño de filtros IIR digitales que ofrece esta toolbox se basa en la conversión de filtros paso bajo analógicos clásicos a sus equivalentes digitales. En las siguientes secciones se describe cómo diseñar filtros y se resumen las características de los tipos de filtro admitidos. Consulte Special Topics in IIR Filter Design para ver los pasos detallados del proceso de diseño de filtros.
Diseño completo de filtros IIR clásicos
Puede crear fácilmente un filtro de cualquier orden con una configuración ftype paso bajo, paso alto, paso banda o eliminador de banda mediante las funciones de diseño de filtros.
Funciones de diseño de filtros
Tipo de filtro | Función de diseño |
|---|---|
Bessel ( |
|
Butterworth ( |
|
Chebyshev tipo I ( |
|
Chebyshev tipo II ( |
|
Elíptico ( |
|
De forma predeterminada, cada una de estas funciones devuelve un filtro paso bajo; solo es necesario especificar la frecuencia de corte que se desea, Wn, en unidades normalizadas de manera que la frecuencia de Nyquist sea 1 Hz). Para un filtro paso alto, añada "high" a la lista de parámetros de la función. Para un filtro paso banda o eliminador de banda, especifique Wn como un vector de dos elementos que contenga las frecuencias del borde de la banda de paso. Añada "stop" para la configuración del eliminador de banda.
Aquí tiene algunos ejemplos de filtros digitales:
[bB,aB] = butter(5,0.4); % Lowpass Butterworth [bC1,aC1] = cheby1(4,1,[0.4 0.7]); % Bandpass Chebyshev Type I [bC2,aC2] = cheby2(6,60,0.8,"high"); % Highpass Chebyshev Type II [bE,aE] = ellip(3,1,60,[0.4 0.7],"stop"); % Bandstop elliptic
Para diseñar un filtro analógico, tal vez para la simulación, utilice una "s" final y especifique las frecuencias de corte en rad/s:
[bBA,aBA] = butter(5,0.4,"s"); % Analog Butterworth filter
Todas las funciones de diseño de filtros devuelven un filtro en la representación de la función de transferencia, de cero-polo-ganancia o del modelo del sistema lineal de espacios de estados, según cuántos argumentos de salida existan. Por lo general, se debe evitar el uso del formato de función de transferencia porque pueden producirse problemas numéricos causados por errores de redondeo. En su lugar, utilice el formato cero-polo-ganancia, que puede convertir en una forma de sección de segundo orden (SOS) mediante zp2sos y, a continuación, utilice la forma SOS para analizar o implementar el filtro.
Todos los filtros paso bajo IIR clásicos están mal adaptados a las frecuencias de corte extraordinariamente bajas. Por ello, en lugar de diseñar un filtro IIR paso bajo con una banda de paso muy estrecha, puede resultar preferible diseñar una banda de paso más amplia y diezmar la señal de entrada.
Diseño de filtros IIR según las especificaciones del dominio de frecuencia
Signal Processing Toolbox™ proporciona funciones de selección del orden que calculan el orden mínimo del filtro que cumple una determinada serie de requisitos.
Tipo de filtro | Función de estimación del orden |
|---|---|
Butterworth |
|
Chebyshev tipo I |
|
Chebyshev tipo II |
|
Elíptico |
|
Estas funciones de estimación del orden son útiles junto con las funciones de diseño de filtros. Suponga que quiere un filtro paso banda con una banda de paso de 1000 a 2000 Hz, bandas de parada que comienzan a 500 Hz a cada lado, una frecuencia de muestreo de 10 kHz, como máximo 1 dB de ondulación de banda de paso y al menos 60 dB de atenuación en la banda de parada. Puede cumplir estas especificaciones si utiliza la función butter de la siguiente manera.
[n,Wn] = buttord([1000 2000]/5000,[500 2500]/5000,1,60)
n = 12
Wn = 1×2
0.1951 0.4080
[bB2,aB2] = butter(n,Wn);
Un filtro elíptico que cumple los mismos requisitos viene dado por
[n,Wn] = ellipord([1000 2000]/5000,[500 2500]/5000,1,60)
n = 5
Wn = 1×2
0.2000 0.4000
[bE2,aE2] = ellip(n,1,60,Wn);
Estas funciones también funcionan con las demás configuraciones de banda estándar, así como con los filtros analógicos.
Comparación de los tipos de filtros IIR clásicos
Signal Processing Toolbox™ proporciona cinco tipos distintos de filtros IIR clásicos, cada uno de ellos óptimo de alguna manera. En esta sección se muestra la forma básica del prototipado analógico de cada uno de ellos y se resumen sus principales características.
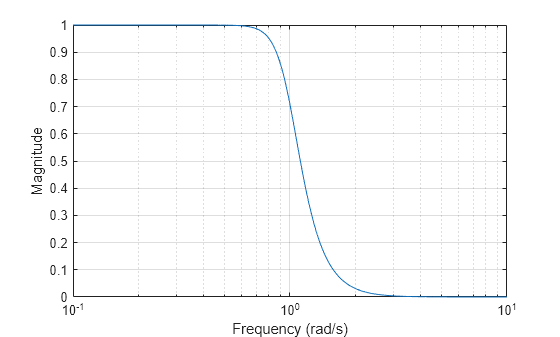
Filtro Butterworth
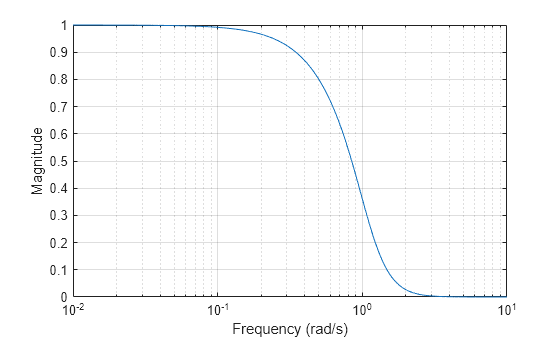
El filtro Butterworth proporciona la mejor aproximación en serie de Taylor a la respuesta ideal del filtro paso bajo en las frecuencias analógicas y , para cualquier orden ; la respuesta de magnitud al cuadrado tiene derivadas nulas en estas ubicaciones (máximamente plana en y ). La respuesta es monótona en general y disminuye suavemente de a . en .
n = 5; [z,p,k] = buttap(n); [bBp,aBp] = zp2tf(z,p,k); [hBp,wBp] = freqs(bBp,aBp,4096); semilogx(wBp,abs(hBp)) grid on xlabel("Frequency (rad/s)") ylabel("Magnitude")
Filtro Chebyshev tipo I
El filtro Chebyshev tipo I minimiza la diferencia absoluta entre la respuesta en frecuencia ideal y la real en toda la banda de paso incorporando una ondulación igual de Rp dB en la banda de paso. La respuesta de la banda de parada es lo más plana posible. La transición de la banda de paso a la banda de parada es más rápida que en el filtro Butterworth. en .
n = 5; Rp = 0.5; [z,p,k] = cheb1ap(n,Rp); [bC1p,aC1p] = zp2tf(z,p,k); [hC1p,wC1p] = freqs(bC1p,aC1p,4096); semilogx(wC1p,abs(hC1p)) grid on xlabel("Frequency (rad/s)") ylabel("Magnitude")
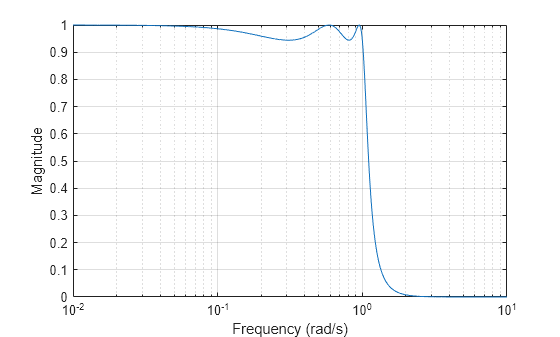
Filtro Chebyshev tipo II
El filtro Chebyshev tipo II minimiza la diferencia absoluta entre la respuesta en frecuencia ideal y la real en toda la banda de parada incorporando una ondulación igual de Rs dB en la banda de parada. La respuesta de la banda de paso es lo más plana posible.
La banda de parada no se aproxima a cero tan rápidamente como en el filtro de tipo I (y no se aproxima a cero en absoluto para un orden de filtro de valor par n). Sin embargo, la ausencia de ondulación en la banda de paso suele ser una ventaja importante. en .
n = 5; Rs = 20; [z,p,k] = cheb2ap(n,Rs); [bC2p,aC2p] = zp2tf(z,p,k); [hC2p,wC2p] = freqs(bC2p,aC2p,4096); semilogx(wC2p,abs(hC2p)) grid on xlabel("Frequency (rad/s)") ylabel("Magnitude")
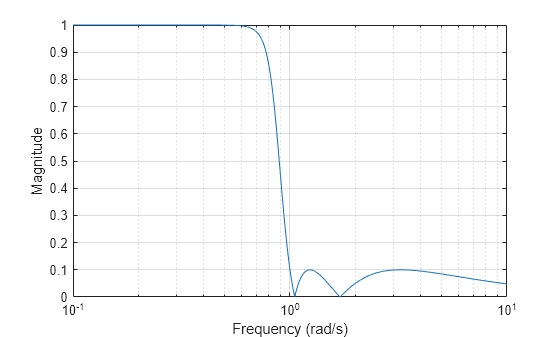
Filtro elíptico
Los filtros elípticos son equiripple tanto en la banda de paso como en la banda de parada. Por lo general, cumplen los requisitos de filtrado con el orden más bajo de cualquier tipo de filtro admitido. Dado un orden de filtro n, una ondulación de la banda de paso Rp en decibelios y una ondulación de la banda de parada Rs en decibelios, los filtros elípticos minimizan el ancho de la transición. en .
n = 5; Rp = 0.5; Rs = 20; [z,p,k] = ellipap(n,Rp,Rs); [bEp,aEp] = zp2tf(z,p,k); [hEp,wEp] = freqs(bEp,aEp,4096); semilogx(wEp,abs(hEp)) grid on xlabel("Frequency (rad/s)") ylabel("Magnitude")
Filtro de Bessel
Los filtros de Bessel paso bajo analógicos tienen un retardo de grupo máximo en la frecuencia cero y conservan un retardo de grupo casi constante en toda la banda de paso. Por ello, las señales filtradas mantienen sus formas de onda en el intervalo de frecuencias de la banda de paso. Cuando un filtro paso bajo de Bessel analógico se convierte en digital mediante la aplicación de frecuencias, deja de tener esta propiedad de máxima planitud. Signal Processing Toolbox™ admite únicamente el caso analógico para la función completa de diseño del filtro de Bessel.
Los filtros de Bessel suelen requerir un orden de filtro superior al de otros filtros para conseguir una atenuación satisfactoria de la banda de parada. en y disminuye a medida que aumenta el orden del filtro .
n = 5; [z,p,k] = besselap(n); [bBsp,aBsp] = zp2tf(z,p,k); [hBsp,wBsp] = freqs(bBsp,aBsp,4096); semilogx(wBsp,abs(hBsp)) grid on xlabel("Frequency (rad/s)") ylabel("Magnitude")
NOTA: Los filtros paso bajo mostrados arriba se crearon con las funciones de prototipado analógico besselap, buttap, cheb1ap, cheb2ap y ellipap. Estas funciones encuentran los ceros, los polos y la ganancia de un filtro analógico de n-ésimo orden del tipo apropiado con una frecuencia de corte de 1 rad/s. Las funciones de diseño completo de filtros (besself, butter, cheby1, cheby2 y ellip) llaman a las funciones de prototipado como primer paso en el proceso de diseño. Para obtener más detalles, consulte Special Topics in IIR Filter Design.
Diseño directo de filtros IIR
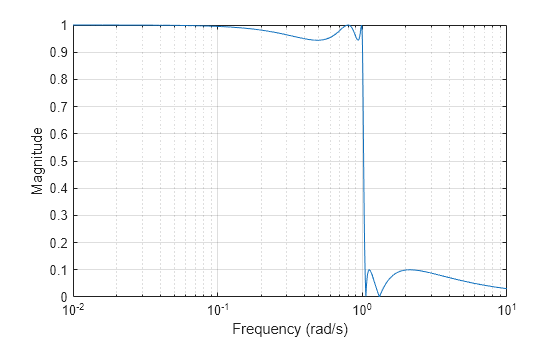
Esta toolbox utiliza el término métodos directos para describir las técnicas de diseño IIR que encuentran un filtro basado en especificaciones en el dominio discreto. A diferencia del método de prototipado analógico, los métodos de diseño directo no están limitados a las configuraciones estándar de paso bajo, paso alto, paso banda o eliminador de banda. Más bien, estas funciones diseñan filtros con una respuesta en frecuencia arbitraria, tal vez multibanda. En esta sección se analiza la función yulewalk, que está pensada específicamente para el diseño de filtros; Parametric Modeling analiza otros métodos que también pueden considerarse directos, como el método de Prony, la predicción lineal, el método de Steiglitz-McBride y el diseño de frecuencias inversas.
La función yulewalk diseña filtros digitales IIR recursivos por medio del ajuste de una respuesta en frecuencia especificada. El nombre de yulewalk refleja su método para encontrar los coeficientes del denominador del filtro: encuentra la FFT inversa de la respuesta ideal de magnitud al cuadrado especificada y resuelve las ecuaciones de Yule-Walker modificadas mediante las muestras de la función de autocorrelación resultante. La instrucción [b,a] = yulewalk(n,f,m) devuelve los vectores fila b y a que contienen los coeficientes del numerador y del denominador n+1 del filtro IIR de n-ésimo orden cuyas características de frecuencia-magnitud se aproximan a las dadas en los vectores f y m. f es un vector de puntos de frecuencia que van de 0 a 1, donde 1 representa la frecuencia de Nyquist. m es un vector que contiene la respuesta de magnitud especificada en los puntos de f. f y m pueden describir cualquier respuesta de magnitud de forma lineal por partes, incluida una respuesta multibanda. La equivalente FIR de esta función es fir2, que también diseña filtros basados en respuestas de magnitudes lineales por partes arbitrarias. Para obtener más detalles, consulte Diseño de filtros FIR.
Tenga en cuenta que yulewalk no acepta información de fase y no se hace ninguna declaración sobre la optimalidad del filtro resultante.
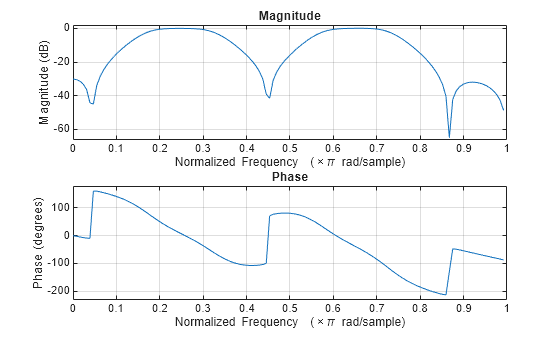
Diseñe un filtro multibanda con yulewalk y represente la respuesta en frecuencia especificada y la real:
m = [0 0 1 1 0 0 1 1 0 0]; f = [0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 1]; [bY,aY] = yulewalk(10,f,m); freqz(bY,aY,128)
Diseño de filtros Butterworth generalizados
La función maxflat permite diseñar filtros Butterworth generalizados, es decir, filtros Butterworth con números distintos de ceros y polos. Esto es recomendable en algunas implementaciones donde los polos son más costosos en términos de cálculo que los ceros. maxflat es igual que la función butter, salvo que se pueden especificar dos órdenes (uno para el numerador y otro para el denominador) en lugar de uno solo. Estos filtros son máximamente planos. Esto significa que el filtro que se obtiene es óptimo para cualquier orden del numerador y del denominador, con el número máximo de derivadas en 0 y la frecuencia de Nyquist ω = π establecidos ambos en 0.
Por ejemplo, cuando los dos órdenes son iguales, maxflat es lo mismo que butter:
[bM0,aM0] = maxflat(3,3,0.25)
bM0 = 1×4
0.0317 0.0951 0.0951 0.0317
aM0 = 1×4
1.0000 -1.4590 0.9104 -0.1978
[bB0,aB0] = butter(3,0.25)
bB0 = 1×4
0.0317 0.0951 0.0951 0.0317
aB0 = 1×4
1.0000 -1.4590 0.9104 -0.1978
Sin embargo, maxflat es más versátil porque permite diseñar un filtro con más ceros que polos:
[bM1,aM1] = maxflat(3,1,0.25)
bM1 = 1×4
0.0950 0.2849 0.2849 0.0950
aM1 = 1×2
1.0000 -0.2402
La tercera entrada de maxflat es la frecuencia de media potencia, una frecuencia entre 0 y 1 con una respuesta de magnitud de 1/√2.
También puede diseñar filtros de fase lineal que tengan la propiedad de máxima planicidad utilizando la opción "sym":
bM2 = maxflat(4,"sym",0.3)bM2 = 1×5
0.0331 0.2500 0.4337 0.2500 0.0331
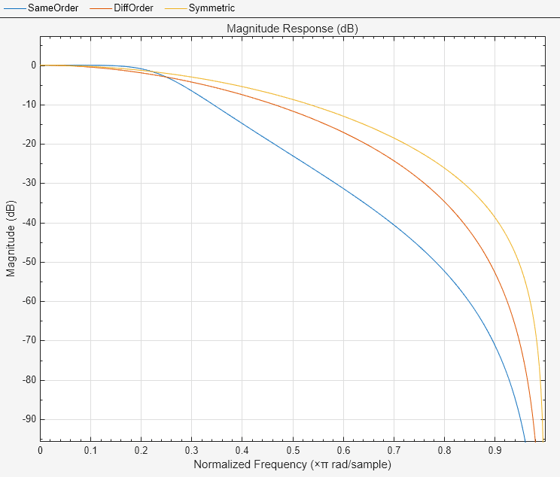
Comparación de las respuestas del filtro:
filterAnalyzer(bM0,aM0,bM1,aM1,bM2,1, ... FilterNames=["SameOrder" "DiffOrder" "Symmetric"])
Para ver todos los detalles del algoritmo maxflat, consulte Selesnick y Burrus [3].